Prácticamente cualquier cosa sirve como chasis. Los hay más ligeros y más pesados pero lo fundamental es que sean suficientemente rígidos como para que no se deformen ante golpes y cuando les pongamos encima los motores, los circuitos y en su caso las baterías, que pueden llegar a pesar bastante.
En mi caso, siento predilección por utilizar las cajas metálicas de lectores de CD-ROM de ordenador estropeados… Son perfectas y nos permiten hacer robots de tamaño medio.

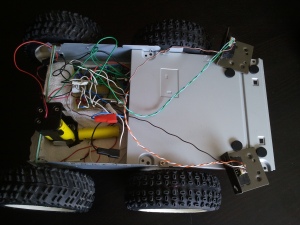
En las fotos tenéis ejemplos de robots que he realizado con esas cajas. Normalmente suelo utilizar cuatro motores Futaba S3003 modificados que pego al chasis utilizando un pegamento fuerte.

Robot explorador
Los Futaba S3003 son fáciles de localizar en cualquier tienda de aeromodelismo… Cuestan un poco caros (unos 8 euros cada uno), pero tienen mucha fuerza. Se puede hacer un robot con dos motores en el centro y luego una ‘rueda loca’. Con eso nos ahorramos dos motores… Es ya cuestión de gustos.

El único problema de esos motores es que no se pueden utilizar tal cual vienen, ya que son servomotores y llevan una electrónica que hay que retirar, así como un tope interno que les impide girar 360 grados. Dedicaré una entrada en el blog a explicar cómo se hace esta modificación. No es complicada pero hace falta tener al menos un soldador y alguna herramienta para cortar el tope de plástico. Siempre se puede recurrir a cualquier otro motor que venga con engranajes.
Los Futaba S3003 tienen también la ventaja de venir con varias piezas de plástico y con su tornillo en el eje, lo que permite adaptarlo directamente a prácticamente cualquier rueda que tenga un orificio central.
Las ruedas se pueden coger de juguetes que ya no utilicemos o comprarlas en tiendas de aeromodelismo o en tiendas por Internet. Por ejemplo las que utiliza el robot de abajo fueron compradas en la tienda online especializada BricoGeek.